
Easily process IMU data from your browser using imuengine.io
Navigation systems rarely have the benefit of directly measuring the information desired. The same can be said about the utility of navigation sensors. The desired state may be the position and terrain slope, but what is measured in simply the range (i.e. distance) and angular-rate. Going from the measurement to information requires an intermediate step: then a miracle occurs.[1]
To call the intermediate step a miracle is acknowledging the efforts of numerous people, and by consequence the creator of these souls, both past and present, in developing a body of knowledge and framework for estimation and sensor fusion. Layered on top of this maturing knowledge is the availability of both sensor hardware and software implementations. This has tempted many people to consider using these navigation sensors in both traditional and non-traditional applications.
In practice, measurements are never perfect. The same aforementioned literature includes ways to analyze the effect of measurement errors on the information derived. This relationship is non-trivial and often depends on the operating circumstances. This introduces an unanswered question for users:
Which sensor do I need for my application?
What is the system accuracy?
Logically, one seeks this information from the data sheet or product literature. However, the mapping from sensor data sheet to information accuracy, well, one can say that this miracle has not yet happened.
The efforts of groups like the IEEE Standards Association has created a level of uniformity in the inertial sensor data sheets. For example, these parameters are often provided:
Accelerometer
- full scale range
- zero-g offset
- zero-g offset temperature coefficient
- sensitivity
- sensitivity temperature coefficient
- noise
- root Allan variance parameters: velocity random walk, bias instability
- filter -3 dB cutoff
- cross-axis sensitivity
Gyroscope
- full scale range
- zero-rate bias
- zero-rate bias temperature coefficient
- sensitivity
- sensitivity temperature coefficient
- noise
- root Allan variance parameters: angular random walk, bias instability
- filter -3 dB cutoff
- cross-axis sensitivity
- linear acceleration sensitivity
Despite this being available for sensor-to-sensor comparison, going from the data sheet to estimated performance is not easy. In fact, the sensor fusion algorithm at hand will also play a role as will the operating environment of the sensor. But this doesn't mean we won't take a step in this direction.
Article Series
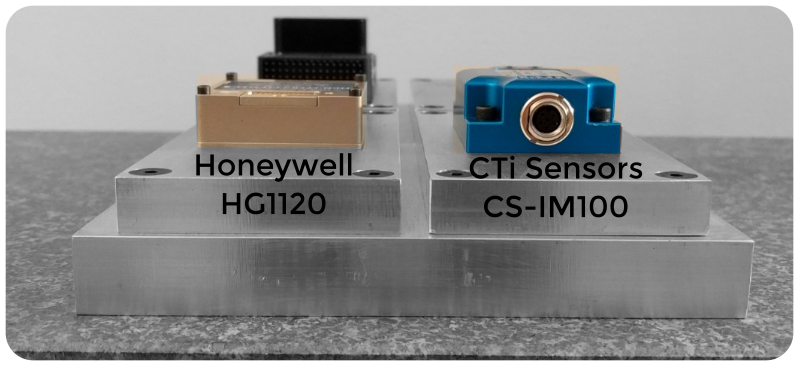
To contribute towards understanding accelerometer and gyro performance specifications we will begin a series of articles explaining the above parameters. The concepts will be further illustrated by drawing on two classes of inertial sensor products:
1.Honeywell's HG1120
2.CTi Sensors CS-IM100
The list above will link to the respective articles, as they become available. Subscribe to our e-mail list to stay abreast of new article publications.
Image copyright credit: ScienceCartoonsPlus.com ↩︎
Comments