
Easily process IMU data from your browser using imuengine.io
Other Names
zero-g or 0g offset, bias, bias repeatability, turn-on to turn-on bias, zero-g output
Examples
| Device | Name | Value |
|---|---|---|
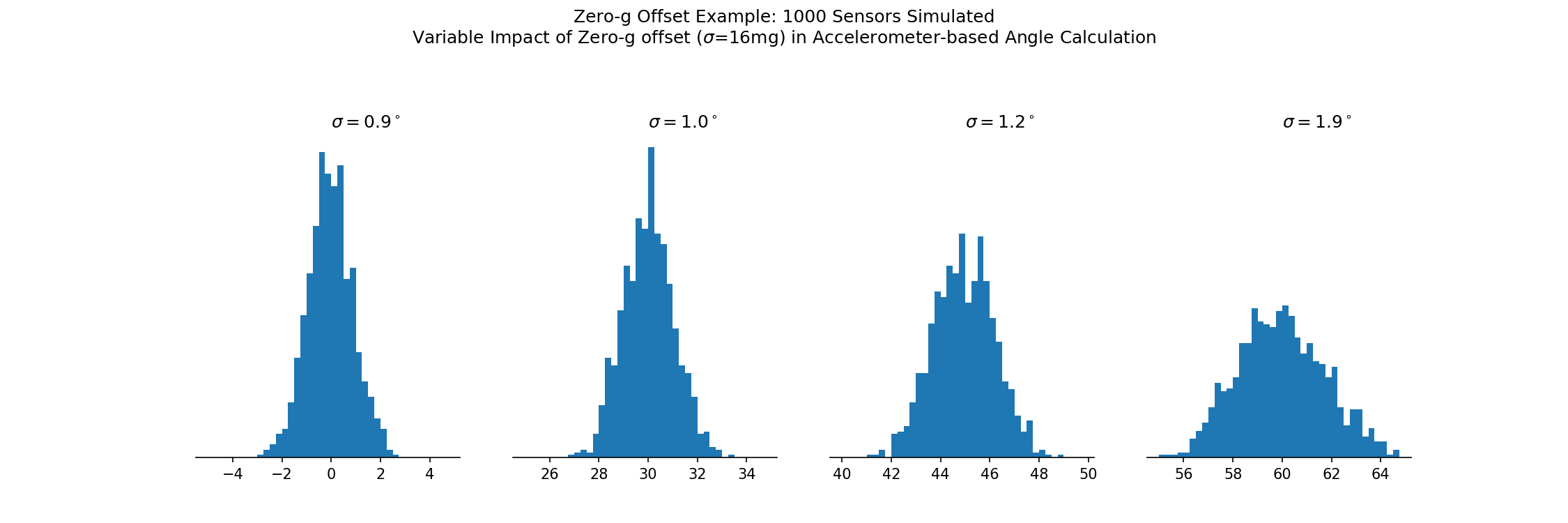
| Honeywell HG1120BA50 | Bias Repeatability, at any given time or thermal condition | 16mg, 1$\sigma$ |
| CTi Sensors CS-IM100 | Zero offset error, at $20^\circ$C | ±2mg |
The name zero-g offset descibes the sensor reading when explosed to a zero-g condition. A perfect sensor would also read zero. Any sensor reading deviating from the 0g condition is the offset or sensor bias. Like full scale range (FSR), this parameter is easy to understand. But unlike FSR, the conditions under which this is specified becomes important and the impact of zero-g offset on the system performance is real and non-trivial.
Firstly, recall that the sensor output error is the combination of a deterministic and random component. Any deterministic bias may be calibrated and removed once and for all time. This is not the topic of this specification. The zero-g offset bias is the turn-on offset that may still occur hereafter. Given the sensor is powered on, what size offset reading is possible?
Secondly, the conditions under which this parameter is specified will lead to vastly different numbers. For example, one manufacturer may test a population of new sensors with repeated power cycles under the condition of room temperature (25C). The distribution of offset numbers will be used to specify the zero-g offset. This is partly the conditions specified in the IEEE STD 2700 for specifying Zero-g offset. While insightful, this says nothing about the offset that can be expected next spring after the vehicle-mounted sensor is stored in an outdoor parking structure throughout winter.
Other manufacturers may specify the bias repeatability over all possible temperature variations and for the expected life of the sensor, including the occurance of mechanical shock exposures. This will be a vastly different number but better captures the expected error over the life of the sensor. The IEEE standard treats zero-g bias variation due to temperature as an independent category. Hence, understanding the test conditions used by the manufacturer to specify the zero-g offset is important.
Therefore the vendor can explain the conditions under which this specification is provided. The ambiguity is partly justified as the definition of expected life of the sensor will differ for each application. The operating conditions for a virtual reality headset is vastly different than that of a delivery Unmanned Aerial Vehicle (UAV).
Specification
The requirement for zero-g offset is informed by the impact of sensor bias on the system accuracy. How does the system performance degrade (or become increasingly uncertain) as the size of the possible sensor bias increases? Therefore specifying the zero-g offset requirement will depend on the sensor fusion algorithm's utility of this sensor reading.
Points to Consider
- The zero-g offset specification will have a greater impact on applications depending on the absolute accuracy of the accelerometer. If the application can make do by measuring changes in sensor output, it will naturally be less sensitive to any bias repeatability.
- In certain applications it is not unreasonable to know (or ask the user to place) the sensor in a zero-g (or known-g) condition. In those circumstances it is possible to mitigate the effect of the zero-g offset online for that particular power cycle.
Final Thoughts
The impact of the zero-g offset is best understood by considering the impact of a fixed turn-on bias on the sensor fusion output. Understand the test conditions used to derive this parameter so that the corresponding conclusions are viewed in the same light.
Simulation Example
Comments